Robotique
Les capteurs électroniques indispensables en robotique
Les capteurs électroniques jouent un rôle crucial dans le domaine de la robotique, permettant aux robots de percevoir et d’interagir avec leur environnement. En effet, ces dispositifs sophistiqués convertissent des grandeurs physiques en signaux électriques exploitables par les systèmes de contrôle des robots. Sans ces capteurs électroniques, les robots seraient incapables de naviguer, de détecter des obstacles, de manipuler des objets ou de réagir à leur environnement de manière autonome. Dans cet article, nous explorerons le fonctionnement de différents types de capteurs couramment utilisés en robotique, tels que les capteurs de proximité, de vision, de mouvement et de force/pression.
Les différents types de capteurs en robotique
Capteurs de proximité
Les capteurs de proximité permettent aux robots de détecter la présence d’objets à proximité et d’en mesurer la distance. Parmi les capteurs de proximité les plus courants, on trouve :
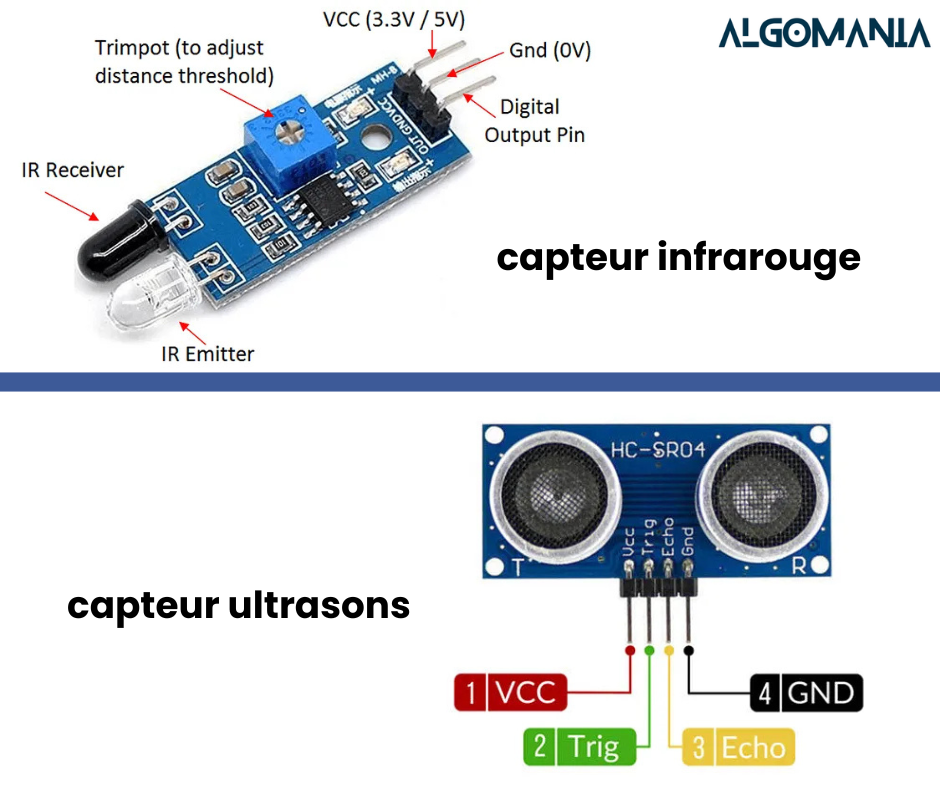
- Capteurs infrarouges (IR) : Ces capteurs émettent une lumière infrarouge et mesurent la quantité de lumière réfléchie par un objet. La distance est déterminée en fonction de l’intensité du signal réfléchi. Les capteurs IR sont simples, peu coûteux et adaptés aux courtes distances, mais peuvent être sensibles aux interférences lumineuses.
- Capteurs à ultrasons : Ces capteurs émettent des ondes sonores à haute fréquence et mesurent le temps nécessaire pour que l’écho revienne après avoir été réfléchi par un objet. Connaissant la vitesse du son, la distance peut être calculée. Les capteurs à ultrasons offrent une plus grande portée que les capteurs IR, mais ont une résolution angulaire limitée et peuvent être affectés par les surfaces absorbantes ou réfléchissantes.
Capteurs de vision
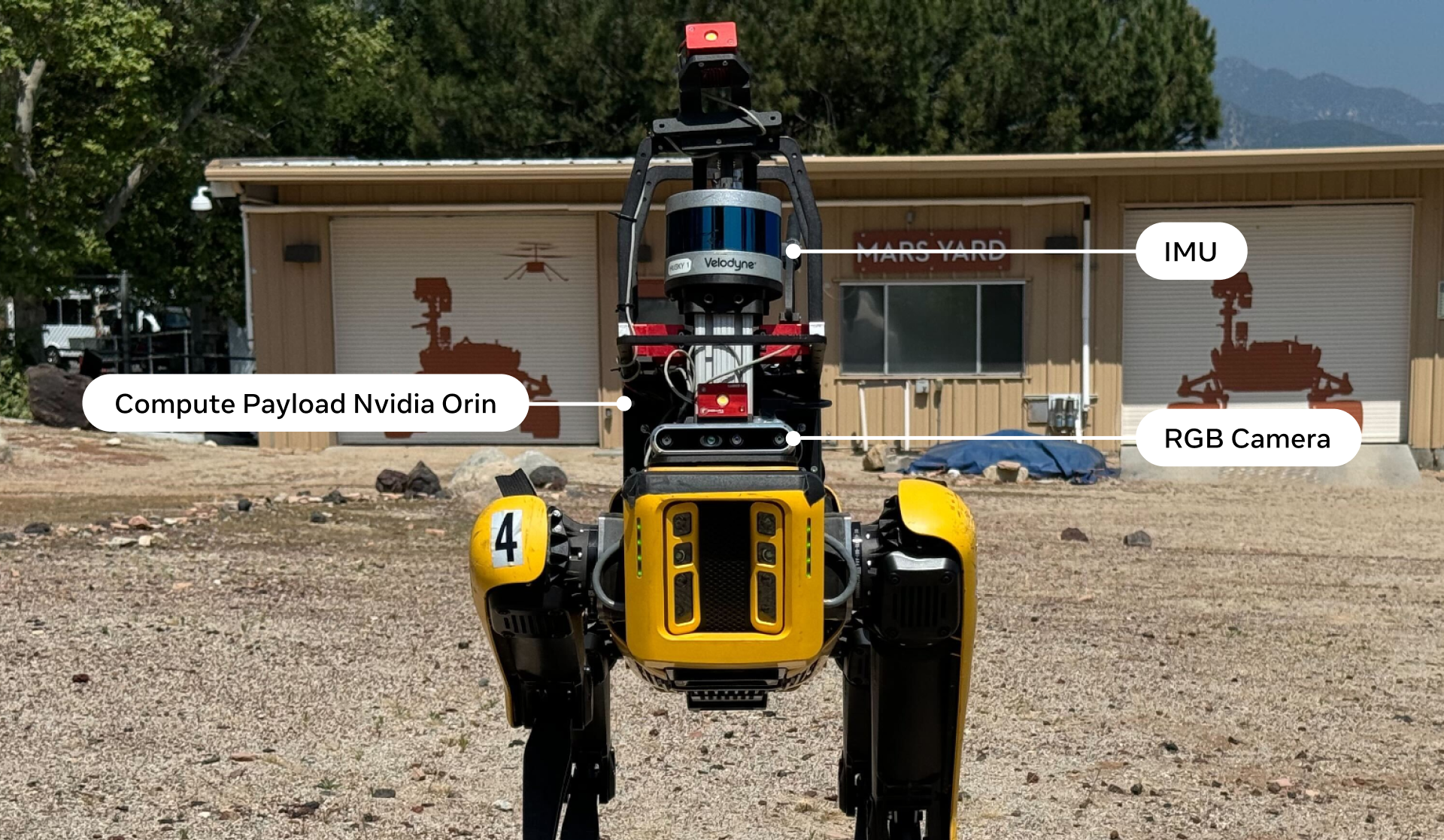
Les capteurs de vision permettent aux robots de percevoir leur environnement de manière visuelle, à l’instar de la vision humaine. Ils jouent un rôle essentiel dans la navigation, la reconnaissance d’objets et l’interaction avec l’environnement. Voici deux exemples de capteurs de vision couramment utilisés :
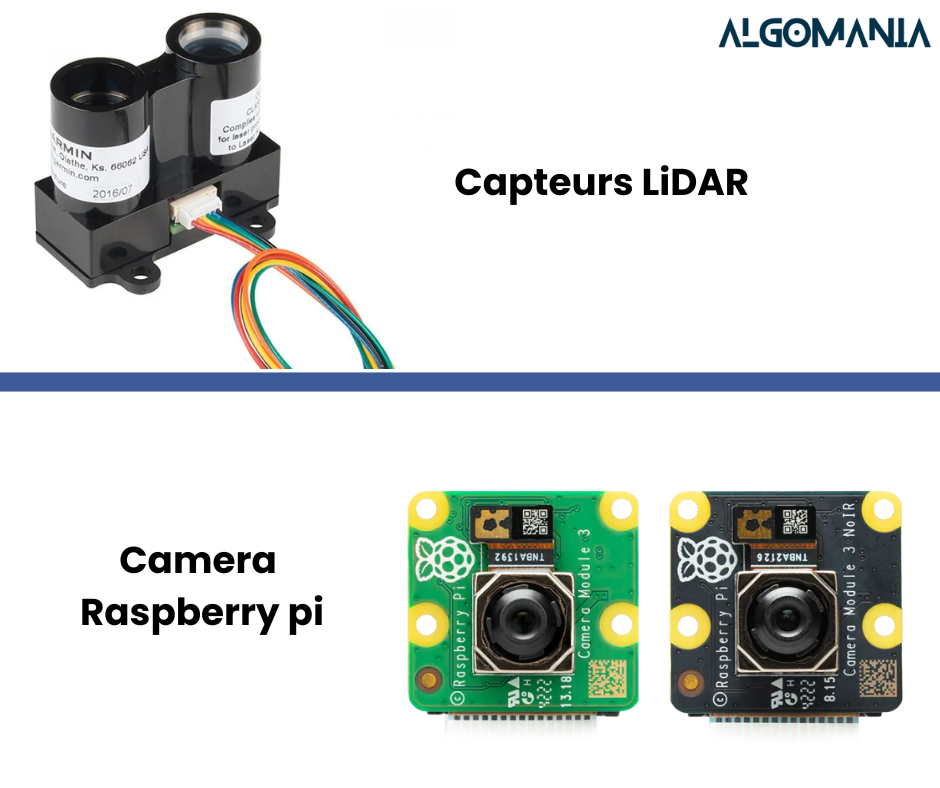
- Caméras et capteurs d’image : Les caméras captent la lumière à travers une lentille et la projettent sur un capteur d’image, généralement un capteur CCD (Charge-Coupled Device) ou CMOS (Complementary Metal-Oxide-Semiconductor). Le capteur convertit la lumière en signaux électriques, qui sont ensuite traités pour obtenir une image numérique. Les caméras peuvent fournir des informations visuelles détaillées, mais nécessitent souvent des algorithmes de traitement d’image complexes pour extraire des informations utiles.
- Capteurs LiDAR : Les capteurs LiDAR (Light Detection and Ranging) utilisent des impulsions laser pour mesurer la distance aux objets environnants. En balayant l’environnement avec un faisceau laser et en mesurant le temps de retour des impulsions réfléchies, les capteurs LiDAR peuvent créer une carte 3D détaillée de l’environnement. Ils offrent une excellente précision et une longue portée, mais peuvent être coûteux et sensibles aux conditions météorologiques.
Capteurs de mouvement
Les capteurs de mouvement permettent aux robots de détecter et de mesurer leurs propres mouvements, ainsi que les mouvements des objets environnants. Ils sont essentiels pour la navigation, la stabilisation et le contrôle des robots. Parmi les capteurs de mouvement les plus courants, on trouve :
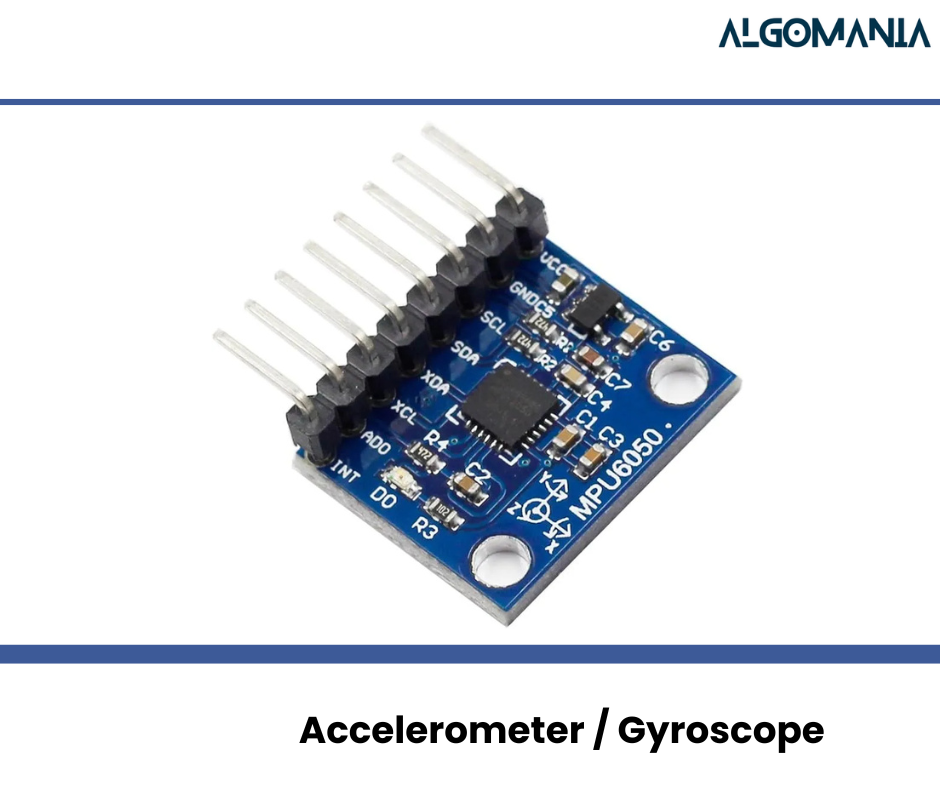
- Accéléromètres : Les accéléromètres mesurent l’accélération linéaire du robot selon trois axes (x, y, z). Ils permettent de détecter les changements de vitesse et d’orientation, ainsi que les vibrations et les chocs. Les accéléromètres sont souvent utilisés en combinaison avec d’autres capteurs pour la navigation inertielle et la stabilisation.
- Gyroscopes : Les gyroscopes mesurent la vitesse angulaire du robot autour de trois axes (roulis, tangage, lacet). Ils permettent de déterminer l’orientation et la rotation du robot. Les gyroscopes sont essentiels pour maintenir l’équilibre et la stabilité des robots, en particulier pour les robots mobiles et les drones.
Capteurs de force
Les capteurs de force et de pression permettent aux robots de mesurer les forces et les pressions exercées sur leurs composants, tels que les pinces, les bras ou les pieds. Ces informations sont cruciales pour la manipulation d’objets, le contrôle de la préhension et l’interaction physique avec l’environnement. Voici quelques exemples de capteurs de force et de pression :
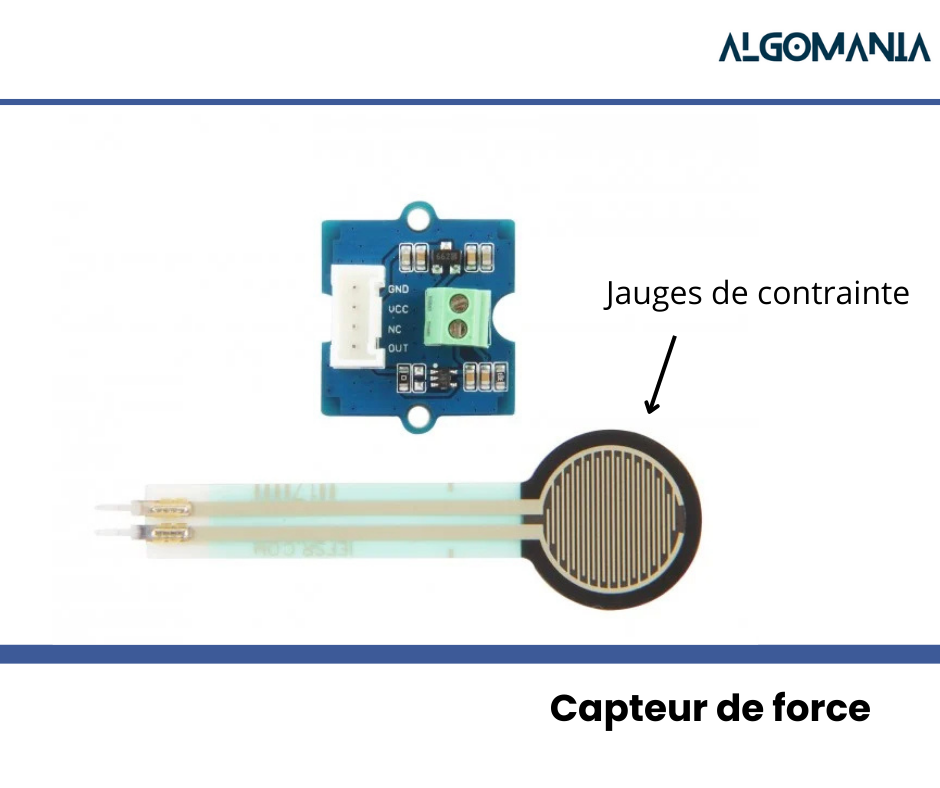
- Jauges de contrainte : Les jauges de contrainte sont des capteurs qui mesurent la déformation d’un matériau sous l’effet d’une force. Elles sont généralement collées sur la surface du composant robotique et changent de résistance électrique lorsqu’elles sont déformées. En mesurant cette variation de résistance, il est possible de déterminer la force appliquée.
Les capteurs, sens essentiels des robots
Les capteurs électroniques sont les yeux, les oreilles et le toucher des robots, leur permettant de percevoir et d’interagir avec le monde qui les entoure. Des capteurs de proximité aux capteurs de vision, en passant par les capteurs de mouvement et de force, chaque type de capteur joue un rôle spécifique et complémentaire dans le fonctionnement des robots.
Les capteurs de proximité, tels que les capteurs infrarouges et à ultrasons, permettent aux robots de détecter la présence et la distance des objets à proximité, facilitant ainsi la navigation et l’évitement d’obstacles. Les capteurs de vision, comme les caméras et les LiDAR, offrent une perception visuelle détaillée de l’environnement, essentielle pour la reconnaissance d’objets, la cartographie et l’interaction.
Concernant les capteurs de mouvement, notamment les accéléromètres et les gyroscopes, sont indispensables pour la navigation, la stabilisation et le contrôle des mouvements des robots. Ils permettent aux robots de maintenir leur équilibre, de suivre leur trajectoire et de réagir aux changements de leur environnement.
En ce qui concerne les capteurs de force, tels que les jauges de contrainte et les capteurs de pression, sont essentiels pour la manipulation d’objets et l’interaction physique avec l’environnement. Ils permettent aux robots de contrôler la force de préhension, d’éviter d’endommager les objets et de réagir aux contacts et aux collisions.
Vers des robots plus intelligents et polyvalents
La combinaison de ces différents types de capteurs, associée à des algorithmes de traitement de données et de prise de décision, permet aux robots d’atteindre des niveaux d’autonomie et de performance de plus en plus élevés. Les progrès constants dans le domaine des capteurs électroniques, ainsi que dans les technologies de l’intelligence artificielle et de l’apprentissage automatique, ouvrent la voie à des robots toujours plus intelligents, polyvalents et adaptables.
À mesure que la robotique continue de se développer et de s’intégrer dans de nouveaux domaines, des usines aux foyers en passant par les hôpitaux et les explorations spatiales, le rôle des capteurs électroniques ne fera que croître en importance. Ces dispositifs sophistiqués, véritables interfaces entre le monde physique et le monde numérique, continueront de repousser les limites de ce qui est possible en robotique, ouvrant ainsi de nouvelles perspectives passionnantes pour l’avenir.